我們可以把復(fù)雜的對位動(dòng)作分解成兩個(gè)簡單的動(dòng)作:平移運(yùn)動(dòng)+旋轉(zhuǎn)運(yùn)動(dòng)。
平移運(yùn)動(dòng),我們可以分為三種情況,分別是X方向運(yùn)動(dòng),Y方向運(yùn)動(dòng),斜向運(yùn)動(dòng):
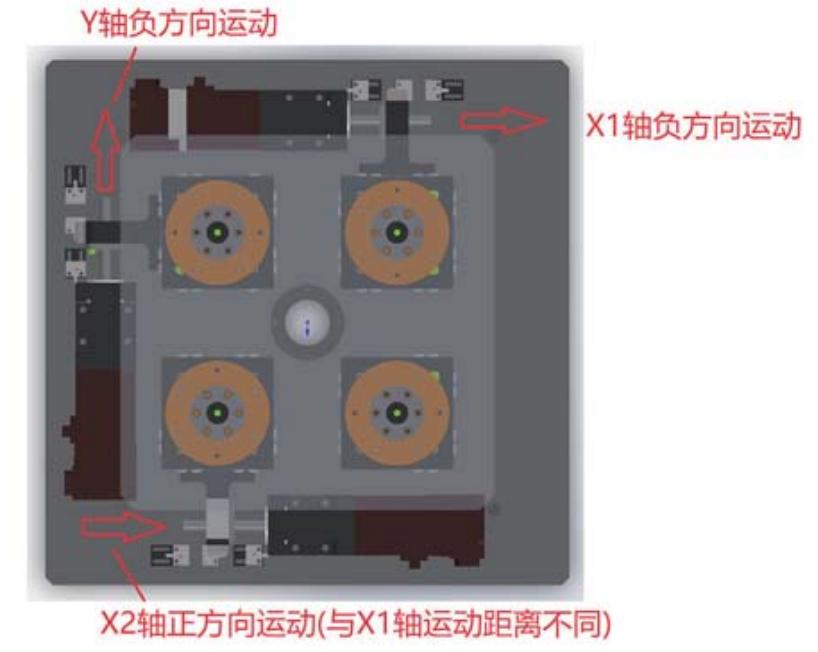
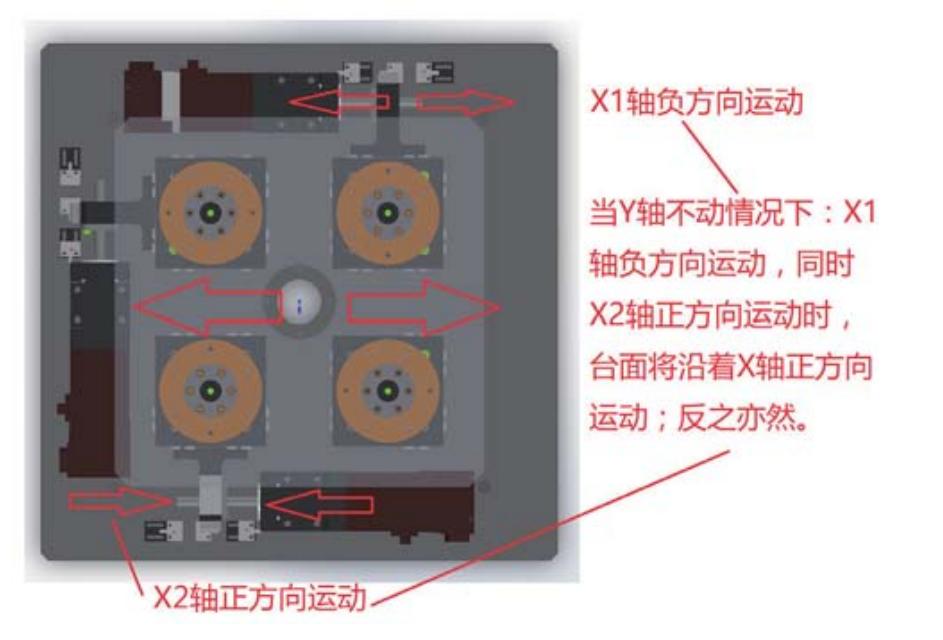
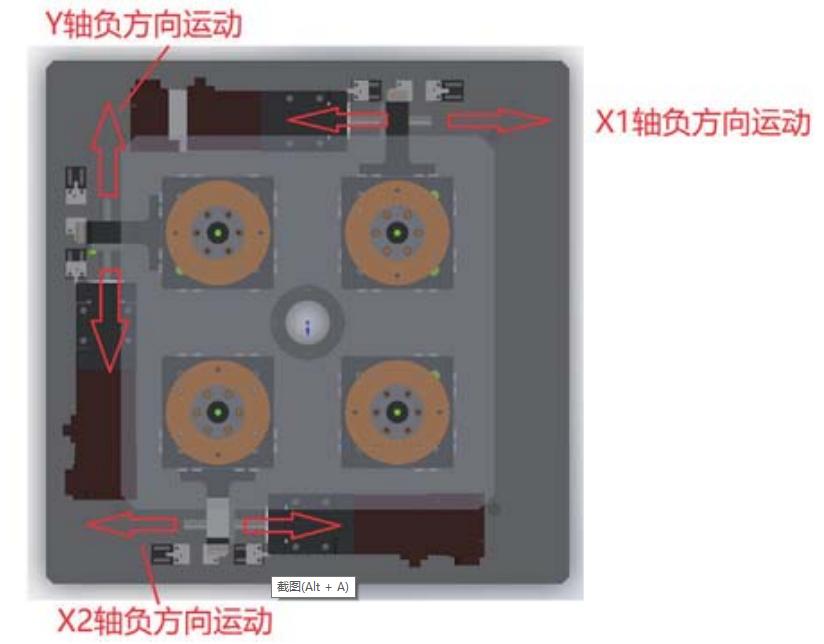
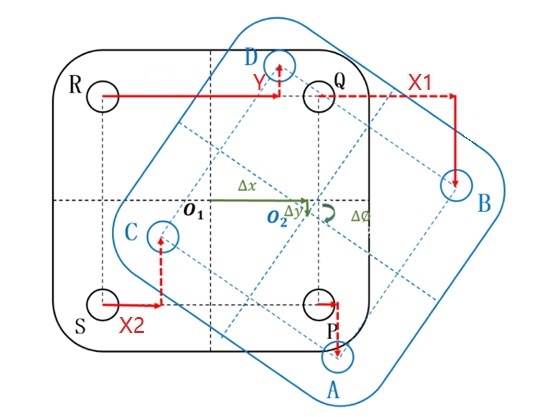
X方向運(yùn)動(dòng):Y軸模組不運(yùn)動(dòng),X1和X2軸模組同時(shí)運(yùn)動(dòng)(運(yùn)動(dòng)距離相同但模組運(yùn)動(dòng)方向相反),臺面便沿著X方向進(jìn)行平移運(yùn)動(dòng)。
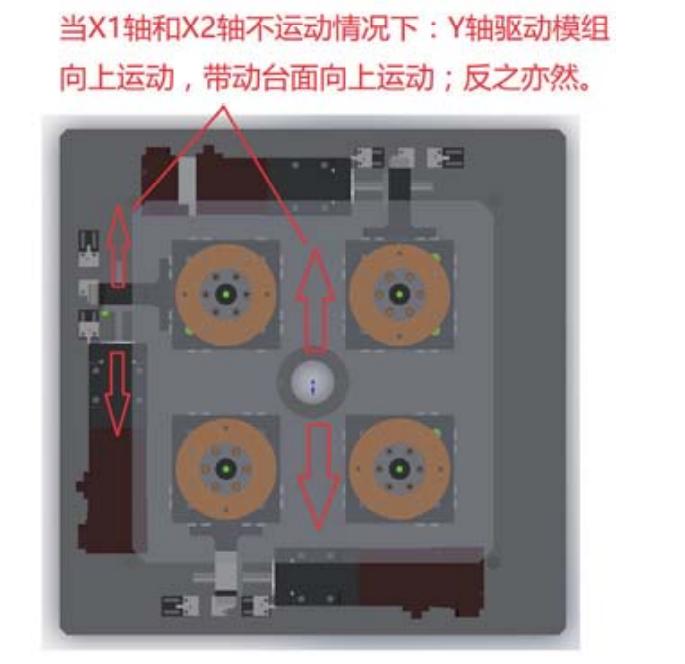
Y方向運(yùn)動(dòng):X1和X2軸模組不運(yùn)動(dòng),Y軸模組運(yùn)動(dòng),臺面便沿著Y方向進(jìn)行平移運(yùn)動(dòng)。
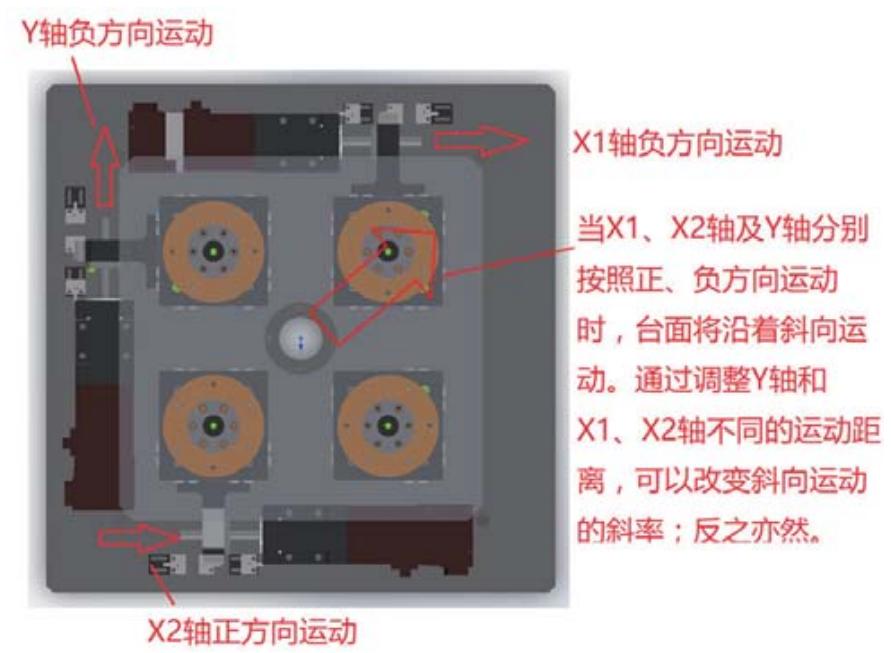
斜向運(yùn)動(dòng):將X方向運(yùn)動(dòng)與Y方向運(yùn)動(dòng)按照所需比例結(jié)合,便可實(shí)現(xiàn)斜向運(yùn)動(dòng)。
旋轉(zhuǎn)運(yùn)動(dòng),我們可以分成繞對位平臺中心旋轉(zhuǎn)和繞其他位置旋轉(zhuǎn)。
繞對位平臺中心旋轉(zhuǎn):當(dāng)X1軸和X2軸同時(shí)運(yùn)動(dòng)(運(yùn)動(dòng)距離相同但模組運(yùn)動(dòng)方向相反),且Y軸也同步運(yùn)動(dòng)時(shí),臺面將繞對位平臺中心旋轉(zhuǎn)。通過設(shè)定Y軸和X1、X2軸運(yùn)動(dòng)的距離和方向,可以改變旋轉(zhuǎn)的角度。
繞其他位置旋轉(zhuǎn):當(dāng)X1軸和X2軸運(yùn)動(dòng)距離不同(無論同向或是反向),Y軸也同步運(yùn)動(dòng),臺面將繞對位平臺上某點(diǎn)旋轉(zhuǎn)。通過設(shè)定Y軸和X1、X2軸運(yùn)動(dòng)的距離和方向,可以改變旋轉(zhuǎn)的角度。
由上分析我們可以清晰地看出,平移運(yùn)動(dòng)非常簡單,只需要輸入對應(yīng)的運(yùn)動(dòng)距離即可,而旋轉(zhuǎn)運(yùn)動(dòng)則需要我們使用算法計(jì)算出對應(yīng)的數(shù)值。接下來,我們著重講解如何進(jìn)行算法運(yùn)算。
首先,我們先分析繞對位平臺絕對中心旋轉(zhuǎn)的基本原理:

|
型號
|
R(mm)
|
θX1(°)
|
θX2(°)
|
θY(°)
|
|
XYR300400
|
137.89
|
45
|
225
|
135
|
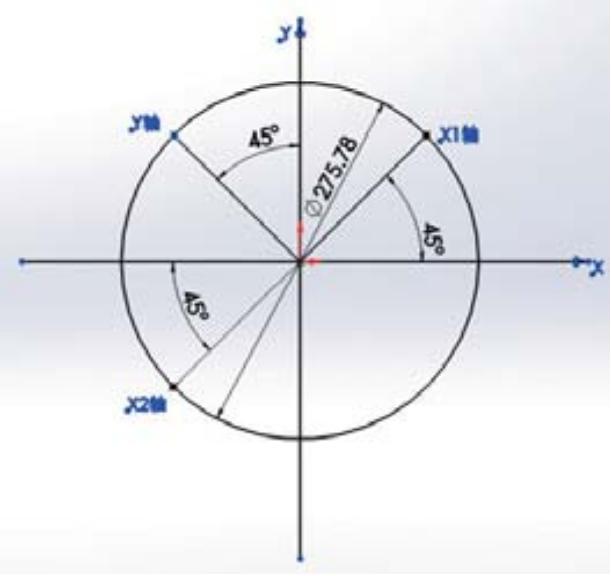
我們先建立直角坐標(biāo)系,將三軸軸承中心坐標(biāo)點(diǎn)在圓周上表示出來:
我們假設(shè)平臺順時(shí)針旋轉(zhuǎn)2°,對X1軸進(jìn)行分析:
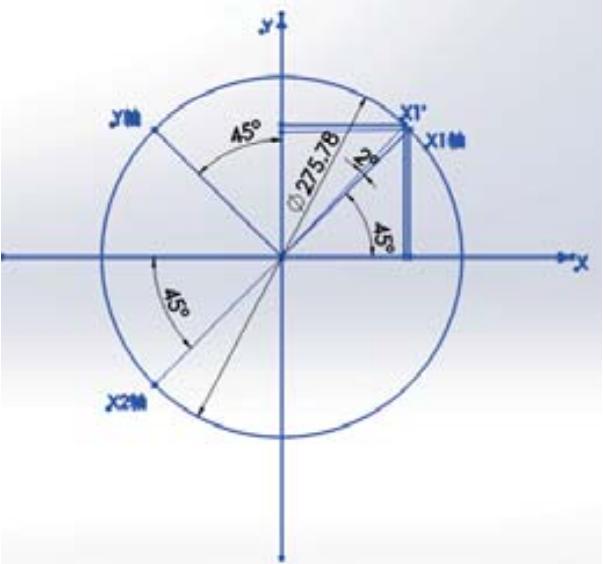
相當(dāng)于X1軸往坐標(biāo)系X軸的負(fù)方向運(yùn)動(dòng),因此得到的應(yīng)該是一個(gè)負(fù)值。通過幾何分析可知,絲杠移動(dòng)的距離為X1’點(diǎn)的橫坐標(biāo)減去X1點(diǎn)的橫坐標(biāo):
137.89 x cos(45°+ 2°) - 137.89 x cos45°= -3.462 (mm)
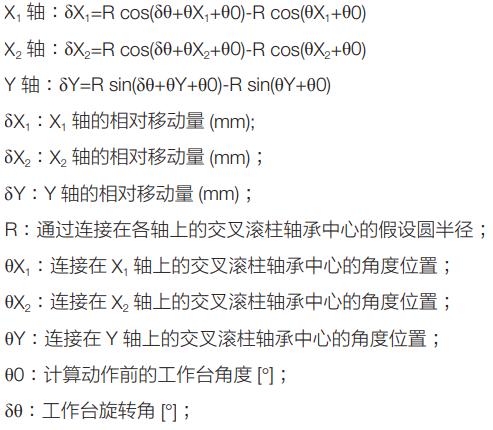
同理,可推導(dǎo)出X2、Y軸的計(jì)算方法,整理后得出普適性各軸相對移動(dòng)量公式:


 13810146393
13810146393 在線咨詢
在線咨詢