說明:
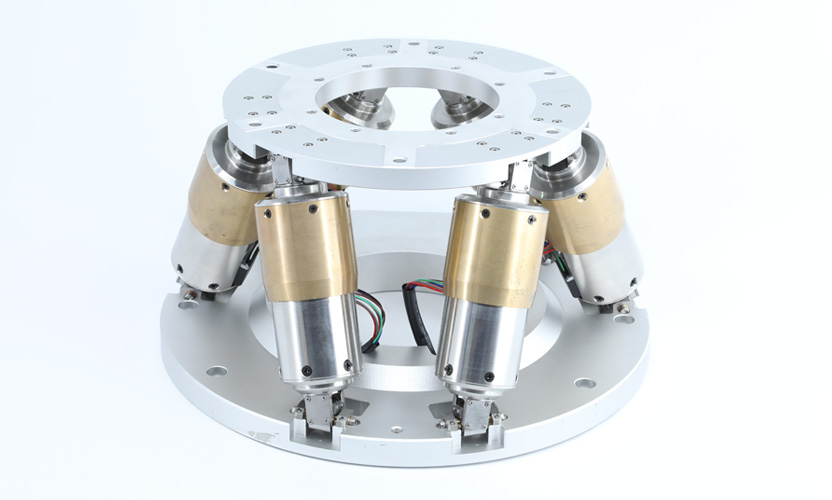
HXP系列六軸并聯(lián)機(jī)器人系統(tǒng)主要用于高精度的六自由度調(diào)整,尤其適合于空間精密對位、微小器件加工和裝配、光通信器件調(diào)芯、晶片檢驗等場合。
機(jī)械主體采用六個推桿+雙虎克鉸結(jié)構(gòu),具有剛性強(qiáng)、重復(fù)定位精度高、可任意位置安裝等特點。推桿采用絕對定位型電機(jī)驅(qū)動,失電后保持位置信息,重啟后無需歸零。電機(jī)驅(qū)動系統(tǒng)采用標(biāo)準(zhǔn)工業(yè)總線EtherCAT進(jìn)行通信,可靠性高、通信效率高,兼容市場上主流運動控制系統(tǒng)。
控制系統(tǒng)與軟件支持各種歐拉角空間變換制式、支持機(jī)器人運行空間坐標(biāo)系管理(包括世界坐標(biāo)系、工件坐標(biāo)系(64組)、機(jī)器人安裝坐標(biāo)系、機(jī)器人驅(qū)動坐標(biāo)系、機(jī)器人工具坐標(biāo)系(64組)的設(shè)置和轉(zhuǎn)換)、支持載荷模擬、具有機(jī)器人空間校準(zhǔn)功能、支持3D姿態(tài)仿真模擬、示教方案等功能。提供二次開發(fā)包,可以根據(jù)實際應(yīng)用,整合成系統(tǒng)設(shè)備。
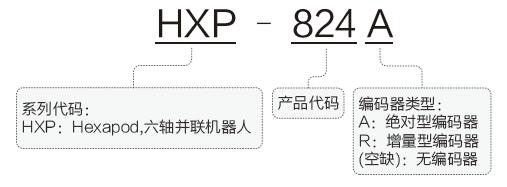
命名規(guī)則:
綜合圖冊-02電動-2020版本-web-resources-1/image/六軸1.png)
綜合圖冊-02電動-2020版本-web-resources-1/image/2_HXP-200_尺寸樣本圖.png)
綜合圖冊-02電動-2020版本-web-resources-1/image/2_HXP-200_尺寸樣本圖1.png)
HXP系列六軸并聯(lián)機(jī)器技術(shù)規(guī)格:(本系列產(chǎn)品為設(shè)計規(guī)格,技術(shù)指標(biāo)以最終發(fā)布內(nèi)容為準(zhǔn))
機(jī)器人參數(shù)
|
機(jī)器人型號
|
HXP-824A
|
|
行程X、Y(mm)*
|
±34
|
|
行程Z(mm)*
|
±15
|
|
行程θX、θY(°)*
|
±11
|
|
行程θZ(°)*
|
±25
|
|
推桿分辨率(µm)
|
0.25
|
|
最小位移X、Y、Z(µm)**
|
1
|
|
最小位移θX、θY、θZ(°)**
|
0.001
|
|
回程X、Y(µm)**
|
3
|
|
回程Z(µm)**
|
1
|
|
回程θX、θY(”)**
|
10
|
|
回程θZ(”)**
|
15
|
|
單向重復(fù)精度X、Y(µm)**
|
±0.5
|
|
單向重復(fù)精度Z(µm)**
|
±0.3
|
|
單向重復(fù)精度θX、θY(”)**
|
±2
|
|
單向重復(fù)精度θZ(”)**
|
±2.5
|
|
推桿最大速度(mm/s )
|
80
|
|
推桿額定速度(mm/s )
|
40
|
|
水平負(fù)載(Kg)
|
20
|
|
任意方向負(fù)載(Kg)
|
2.5
|
|
電機(jī)類型
|
步進(jìn)伺服電機(jī)
|
|
工作溫度范圍(℃)
|
+10 ~ +40
|
|
材料
|
不銹鋼/鋁合金
|
|
質(zhì)量(Kg)
|
7
|
|
電纜長度(m)
|
2
|
*注:原點處行程
**注:實測典型值
控制器參數(shù)
|
控制器型號
|
TMC-NET-HXP
|
|
額定電壓(V)
|
AC 220
|
|
額定電流(A)
|
1.5
|
|
額定功率(W)
|
350
|
|
工作溫度范圍(℃)
|
0 ~ +55
|
|
基本軸類型
|
EtherCAT/RTEX/6 差分脈沖軸
(另輸出口可配置 6 個單端脈沖軸)
|
|
內(nèi)部 IO 數(shù)
|
24 進(jìn) 12 出(帶過流保護(hù),內(nèi)置拓展)
|
|
內(nèi)部 ADDA 數(shù)
|
2 路 AD,2 路 DA(0-10V,內(nèi)置拓展)
|
|
最多擴(kuò)展 AD/DA
|
256 路 AD,128 路 DA
|
|
脈沖位數(shù)
|
64
|
|
編碼器位數(shù)
|
64
|
|
速度加速度位數(shù)
|
64
|
|
脈沖最高速率
|
10Mhz
|
|
每軸運動緩沖數(shù)
|
4096
|
|
數(shù)組空間
|
640000
|
|
程序空間
|
8000Kbyte
|
|
Flash 空間
|
|
|
256MByte
|
256MByte
|
|
通訊接口
|
外置:以太網(wǎng) 內(nèi)置拓展:RS232,RS485,以太 網(wǎng),U 盤,CAN, RTEX,EtherCAT
|


 13810146393
13810146393 在線咨詢
在線咨詢